
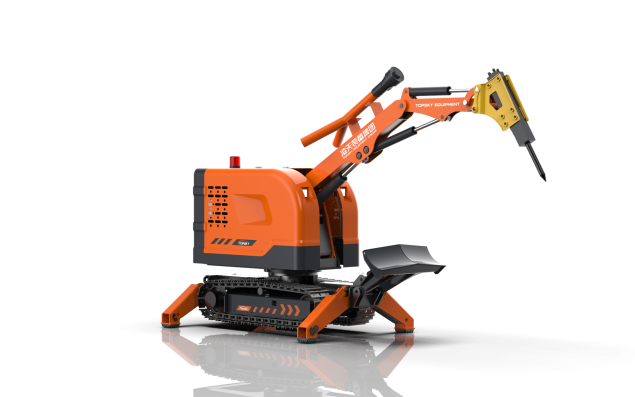
Robot mbibi ọkụ RXR-J150D

Nchịkọta
Ọ nwere ike dochie ndị mmadụ na-egbu egbu (emetọ), daa, ike radieshon na ndị ọzọ pụrụ iche dị ize ndụ nnapụta ebe, na nwekwara ike remotely ịchịkwa robots maka ewu ewu, ihe mkpọpu ala na igbutu, ọwara gwuputa, mberede nnapụta, metallurgical ọkụ slagging na lining mwepụ , The mmezi nke rotary kiln na mwepu nke ngwá ọrụ nuklia iji zere ndị merụrụ ahụ;
Oke ngwa
l Nnapụta ọkụ maka nnukwu mmanụ ala na ụlọ ọrụ kemịkalụ
l Ọwara, ụzọ ụgbọ oloko na ebe ndị ọzọ dị mfe ịdaba na mkpa ịbanye nnapụta na ọgụ ọkụ
l Nnapụta na gburugburu ebe gas ma ọ bụ mmiri mmiri na-enwu ọkụ na mgbawa nwere ike ịdị oke elu
l Napụta na gburugburu ebe nwere nnukwu anwụrụ ọkụ, gas na-egbu egbu na nke na-emerụ ahụ, wdg.
l Napụta na gburugburu ebe a chọrọ ọkụ dị nso na ndị mmadụ na-enwekarị mmerụ ahụ mgbe ha rutere nso
Atụmatụ
- ★ N'otu ọkwa nke igwe, ike dị ukwuu na ike ịnya ụgbọ ala siri ike;
- ★ Enwere ike ịgbanwuo ma gbanyụọ rọbọt ahụ n'ebe dị anya, a na-ejikwa engine diesel mee ike, nke dị ike karịa ígwè ọrụ batrị ma nwee ogologo ndụ batrị;
- ★ Kwadebere na multi-arụ ọrụ ezumike ngwá ọrụ isi, na multiple ọrụ ụdịdị dị ka ịcha, ịgbasa, squeezing na-etipịa;
- ★ Ọrụ nchọpụta gburugburu ebe obibi (nhọrọ): Ejiri usoro robot nwere modul nlekota gburugburu ebe obibi iji chọpụta anwụrụ ọkụ na saịtị na gas dị ize ndụ;
Nka nka:
4.1 Robot dum:
- Aha: ỌkụRobot mbibi
- Ụdị: RXR-J150D
- Ọrụ ndị bụ isi: isi ngwá ọrụ na-akụda ọtụtụ ihe na-arụ ọrụ, nke nwere ọtụtụ ụdị ọrụ dị ka ịcha, ịgbasa, ịpịa, na ịkụpịa;
- Mmejuputa ụkpụrụ ụlọ ọrụ nchekwa ọkụ: “GA 892.1-2010 Robots Fire Part 1 General Technical Requirements”
- ★ Chassis Ọdịdị: ATV hydraulic crawler chassis nakweere
- ★ Ike: mmanụ dizel engine (27kw) + hydraulic mgbapụta usoro
- Akụkụ: ogologo 3120mm*obosara 800mm*elu 1440 mm
- ★ obosara ije: ≤800mm
- ★ Ogologo ije: ≤1450mm
- Arọ: 2110kg
- ★ ike traktị: ≥10000N
- ★ Ntụnye Dozer: ≥10000N
- ★ Ọsọ ahịrị kwụ ọtọ kacha: ≥0~3km / h, remote control stepless ọsọ
- ★ Ikike ịrị elu: 58% (ma ọ bụ 30°)
- Ebe njikwa anya: 100m
- ★ ikike nnapụta: shọvel ịkwanye arụnyere, nke enwere ike iji wepụ ihe mgbochi;mgbanaka traction wuru na ọdụ, nwere ike iburu ihe mgbapụta na saịtị ọdachi, ma nwee ike ịdọrọ ụgbọ ala nnapụta n'ime ebe nnapụta;
4.2 Sistemụ arụmọrụ:
① hamma hydraulic:
Ike mmetụta (joule): ≥250
Ugboro mmetụta (oge / nkeji): 600~900
Dayameta mkpịrị osisi (mm): 45
② Njide ọtụtụ ọrụ (nhọrọ):
Nke kacha oghere (mm): ≥700
Ibu ibu (kg): ≥150
Ike (L): ≥21
Obosara (mm): ≤480
Ọrụ: Ọ nwere ọrụ nke ijide, ịnakọta na ịnyefe, ntụgharị ogo 360
③ Multifunctional grabber (nhọrọ):
Ibu arọ (kg): ≥150
Nke kacha oghere (mm): ≥680
Ọrụ: Ọ nwere ọrụ na-agbanwe agbanwe maka ijide, njikwa, ịkwanye na ịnyefe nnukwu ihe
④ Mgbasa ịkwa osisi (nhọrọ):
Ike ịkwa osisi (KN): ≥200
Ike mgbasawanye (KN): ≥30
Ọrụ: Site na ọrụ ntụgharị, ọ nwere ike mezue ịkpụ, mgbasawanye, nkewa na iburu ọrụ
⑤ Dozer (nhọrọ):
Ogologo * obosara (mm): ≤780*350
Ogologo ebuli elu (mm): ≥670
Ọrụ: A na-eji ya dị ka nkwado a kapịrị ọnụ mgbe ọ na-ekpochapụ ihe mgbochi na idobe ahụ ụgbọ ala
⑥ Igwe ọkụ eletrik (nhọrọ):
Ụdị ụgbọala: mbanye eletrik
Ọrụ: Ịtụ na ịdọrọ ụgbọ ala na akụrụngwa ndị tọrọ atọ, nke a na-ejikwa maka ịzọpụta onwe
4.3 Sistemu emenyụ ọkụ robot (nhọrọ):
- Igwe nleba anya ọkụ: igwe eletrọnịkị na-achịkwa ọkụ ọkụ
- Ụdị ihe na-emenyụ ọkụ: mmiri ma ọ bụ ụfụfụ
- Ihe: egbe ahụ-igwe anaghị agba nchara, egbe isi-aluminom alloy siri ike anodized
- Nrụgide ọrụ (Mpa): 1.0~1.2 (Mpa)
- Usoro ịgbasa: ugbu a kpọmkwem, atomization, ụfụfụ dị ala na-agbasa
- ★ Mmiri / ụfụfụ eruba ọnụego: 80L / s
- Oke (m): 85m (mmiri)
- ★ Ntugharị n'akuku: horizontally na-atụgharị na ụgbọ ala na-atụgharị tebụl, na-atụgharị na vertikal na ogwe aka n'ibu.
- Oke ịgba n'akuku: 120°
- Ụfụ ụfụfụ: Enwere ike dochie tube ụfụfụ, na usoro ngbanwe bụ njikọ ngwa ngwa.Igwe nleba anya mmiri ọkụ nwere ike ịgba mmiri, ụfụfụ na mmiri agwakọta, nke mere na enwere ike iji otu ogbugba mee ọtụtụ ebumnuche.
4.4 Sistemụ nyocha robot (nhọrọ):
Site n'ịhazi ngwa gas na modul nlekota gburugburu ebe obibi, enwere ike ịchọta ikuku na-egbu egbu na nke na-emerụ ahụ na saịtị ọrụ;
- ★Gas na gburugburu ebe a na-achọpụta modul (nhọrọ): kwadebere na ikuku mberede nnapụta ngwa ngwa nchọpụta usoro na okpomọkụ na iru mmiri detector, nke nwere ike ịchọpụta: PM2.5, mkpọtụ, VOC, O3, SO2, H2S, NO, CO, CH4 , iru mmiri okpomọkụ;
4.5 Nwepu njikwa ọnụ nhazi paramita
- Oge ọrụ: 8h
- Ọrụ ndị bụ isi: njikwa ime ihe ngosi atọ, na-akwado eriri ergonomic;jikwaa robọt n'ihu, azụ azụ, ịkwọ ụgbọ na mmegharị ndị ọzọ;ogwe aka roboti na-achịkwa elu na ala, ntụgharị;ngwaọrụ setịpụrụ imeghe, mechie na tụgharịa;mmiri mmiri maka kpọmkwem ugbu a na atomization.Usoro nnyefe data na-anabata akara ezoro ezo maka nnyefe ikuku.
- Ọrụ njikwa ije: Ee, abụọ joysticks ụlọ ọrụ otu-axis, otu joystick na-achọpụta ọrụ crawler na-aga n'ihu na azụ n'akụkụ aka ekpe nke robot ahụ, mmadụ wee ghọta ọrụ n'ihu na azụ azụ nke crawler ziri ezi.
- Ọrụ njikwa ọkụ: Ee
- Hammer hydraulic, multi-function grab, grabber, shearing expander na ọrụ ndị ọzọ: Ee
- Ọkụ ọkụ, ọrụ njikwa oriọna ịdọ aka ná ntị: Ee, mgba ọkụ na-ekpochi onwe ya
- Ngwá ọrụ inyeaka: eriri ubu akara n'ime obodo
4.6 Ọrụ ịntanetị:
1. GPS Ọrụ (nhọrọ): GPS n'ọnọdu, egwu nwere ike jụrụ
4.7 Ndị ọzọ:
★Atụmatụ njem mberede (nhọrọ): ụgbọ ala na-adọkpụ nke robot raara onwe ya nye ma ọ bụ ụgbọ njem ụgbọ njem raara onwe ya nye
nhazi ngwaahịa:
- Robot mgbawa ọkụ × 1
- Ọnụ akara njikwa anya nke ejiri aka × 1
- Robotchaja (27.5V) × 1 set
- Igwe ojii njikwa igwe ojii × 1 set (nhọrọ)
- Ụgbọ njem mberede robot × 1 (nhọrọ)





